 下载格隆汇APP
下载格隆汇APP
 下载诊股宝App
下载诊股宝App
 下载汇路演APP
下载汇路演APP
 社区
社区
 会员
会员
Robotaxi是L4自动驾驶的重要落地场景。作为智能驾驶系列报告的第三篇,本文围绕Robotaxi,重点探讨市场关注的四大问题:1)Robotaxi对技术栈有何特殊要求,当前技术的成熟度怎样?2)Robotaxi的单位经济(UE)模型怎样计算,未来提升空间如何?3)从政策和企业的视角,Robotaxi的落地进行到哪一步了?4)如何看待Robotaxi的投资逻辑?
摘要
Robotaxi对技术栈有何特殊要求,当前技术的成熟度怎样?Robotaxi模式成立的核心在于由系统自动化完成驾驶、基本无需人工干预,其技术栈的要求既与城市NOA追求的强泛化能力、高度拟人化的智能驾驶模型一致,又需要满足安全性和冗余性。当前,Robotaxi已展示出明显的技术进步,但提升空间仍在。中金研究认为Transformer、端到端、多模态和世界模型等人工智能前沿进展或有用武之地,有望加速智能驾驶能力的升阶。
Robotaxi的单位经济(UE)模型怎样计算,未来提升空间如何?作为一种客运服务,Robotaxi主要按行驶里程收费;成本端,Robotaxi企业需承担车辆的折旧、安全员成本、电费、停车费和保险费等成本,其中收入、折旧、安全员成本是影响Robotaxi UE模型的三个重要因素。Robotaxi商业模式多元,分为重资产和轻资产等不同形态,但在早期其UE模型通常都为亏损状态,未来改善则需持续关注技术、政策和车队数量等层面的变化。
从政策和企业的视角,Robotaxi的落地进行到哪一步了?中国Robotaxi正逐渐进入从研发测试到商用部署的过渡期,国家和地方多项政策助力行业健康发展,海外的相关政策法规亦在不断推进。从企业的视角,中美各个头部的Robotaxi企业正在持续拓展商业版图,当前来看其体量相对有限,所处阶段为道路测试到商业化运营不等。
如何看待Robotaxi的投资逻辑?Robotaxi行业的长远发展依赖于技术、商业化和政策三个要素形成正循环。在正循环中,Robotaxi的UE水平逐渐改善,企业有意愿投放更多车辆,而车队规模的扩大可以持续摊薄前期研发成本,企业盈利改善,推动行业走向健康可持续的发展。但在正循环形成前,Robotaxi企业或承担一段时间的亏损。中金研究认为,资金实力、数据闭环、软硬一体和技术创新能力等是Robotaxi企业现阶段的关键竞争要素。
风险
技术探索进程缓慢;商业化受阻;行业竞争加剧;政策进展不及预期。
正文
问题1:Robotaxi对技术栈有何特殊要求,当前技术的成熟度怎样?
当前:Robotaxi要求系统的泛化、拟人和冗余,现有技术栈仍有进步空间
Robotaxi是L4自动驾驶重要的商业化落地场景,其模式成立的核心在于系统自动化完成驾驶、基本无需人工干预,是人工智能技术发展到一定高度后的产物。站在自动驾驶企业的角度,要达成系统自动化驾驶的目标,至少需要满足2个条件:
1)系统的能力足以实现自动化驾驶,从C端乘客的视角,其愿意选乘Robotaxi,基本要求是Robotaxi在安全、舒适、高效等维度上和传统模式持平、甚至超过传统模式,这就涉及到系统本身的能力问题,属于本章讨论的技术范畴;2)实现的方式是具有性价比的、符合市场商业逻辑的,如此自动驾驶企业方能可持续发展、C端乘客支付的价格方有下降空间,这就涉及到单位经济(UE)模型的问题,将在下一章详细讨论。
具体拆分安全、舒适、高效等维度,他们在技术上意味着:1)安全:系统能够避免或者减少酒驾、注意力不集中和反应慢等情况,但是系统有出故障的概率、神经网络本身也是一个概率模型,Robotaxi需要做到即使软件和硬件失效,也能保证最底线的安全;
2)舒适:系统需要高度拟人化,像人类驾驶员一样处理各种场景,减少急刹和顿挫;3)高效:要求Robotaxi能达到一定的行驶速度,给予乘客自由选择路线和上下车地点的灵活度,能够妥善应对Corner case(长尾场景)和他车交互博弈,而非单纯地停车等待。
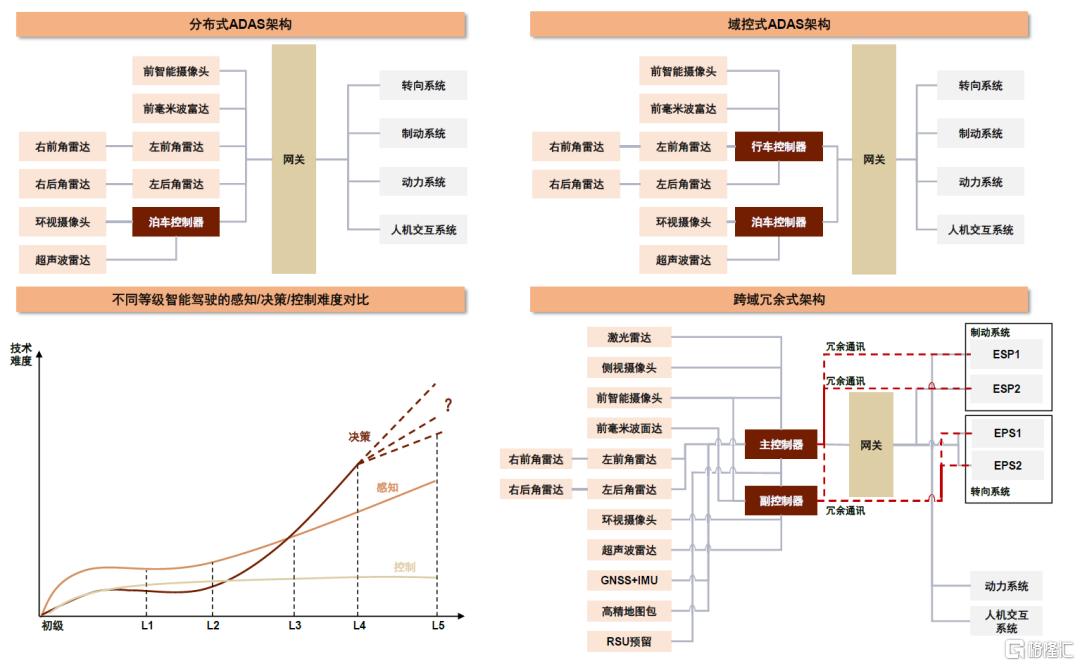
图表1:智能驾驶系统的升阶,对硬件和软件能力提出更高的要求
资料来源:清华大学车辆与运载学院,毫末智行公众号,九章智驾,中金公司研究部
由此可见,Robotaxi对技术栈的要求,与当前城市NOA所追求的强泛化能力、高度拟人化的智能驾驶模型是一致的,而由于基本没有人工干预,Robotaxi需要将这些维度推到极致,并满足安全性和冗余性。
所以,在Robotaxi的技术栈中,一方面可以看到更高的神经网络渗透率、更复杂的模型架构、更多的精细化模型积累乃至更大的模型规模,而另一方面其在感知上会有更多传感器(如激光雷达)和高精度地图冗余,在决策上通常增加规则代码兜底,以增加技术栈的冗余性。在系列报告第一篇[1]中,中金研究将这些要求总结为“完备性”和“冗余性”。
近年在国内外各类L4的路测和示范运营中,Robotaxi已经展示出明显的技术进步,行驶整体平稳,能较好地完成转弯、变道和礼让行人,在极端天气、早晚高峰、城中村等复杂场景中也有不错表现。
但是同时,中金研究认为当前的技术水平也有进一步提升的空间,例如部分长尾场景(道路上出现编织袋)和突发情况(道路临时改道)的处理尚不完美,行驶策略偏保守(遇到他车可能直接刹停而非博弈),灵活性有待增强(网约车场景下,驾驶员可以灵活选择路线和接客地点,但Robotaxi目前暂未实现),安全性(含网络安全)需要持续强化。
中金研究认为,这些问题的存在,或意味着整个自动驾驶行业仍然要朝着模型/算法的泛化性、拟人性和安全性等方向继续前进。
图表2:当前Robotaxi技术栈能做到的和仍有提升空间的领域

注:各家企业Robotaxi的技术水平不同,图中所列能力仍有提升空间的领域为根据公开资料提到的案例总结,并非适用所有Robotaxi企业 资料来源:文远知行官网,百度Apollo公众号,小马智行官网,侠客岛,虎嗅,中金公司研究部
未来:人工智能前沿进展有望助力Robotaxi技术栈的完善
回归技术栈的视角,经过多年的发展,以Robotaxi为代表的智能驾驶技术栈已有较多的沉淀,经典的技术栈通常为模块化的架构,感知、预测、决策和控制各司其职,AI模型在各个模块中有不同程度的渗透。在经典的技术栈下,智能驾驶的部分难题已经得到较好的解决,例如BEV + Transformer较好地解决了感知模块的向量空间搭建问题,AI模型在规控模块的引入能较显著地提升乘坐的舒适感、将智能驾驶的能力带入到更为复杂的场景中。
然而,智能驾驶技术仍有难题有待攻克:
► 感知:Corner case的感知是主要的难点之一,如道路上奇形怪状的长尾障碍物、特别极端的天气和道路临时变道等。感知是智能驾驶技术栈的第一道“关卡”,如果感知模块出现漏检误检,那么后续模块或会承担较大的压力。
► 预测:首先是交互,动态障碍物的未来轨迹不仅和自身有关,还和其与其他动态障碍物的交互有关,复杂场景的预测通常涉及对多主体交互的建模。其次是Corner case,即各类长尾障碍物未来的轨迹预测。
► 决策:感知和预测模块输出的结果带有概率值,决策模块本质上需要在一个不确定的环境下工作(当然,利用高精度地图可以一定程度上环节感知结果的不确定性)。在复杂的场景下,如何像熟练的人类驾驶员一样和其他车辆去博弈和交互,如何更加拟人的处理各类复杂工况乃至Corner case(如大雪天的形式),如何让自动驾驶决策的乘坐体感和人驾模式一致,是决策模块面临的主要难点。
► 控制:控制更多是工程和数学问题,但在Robotaxi的场景下,硬件的调校、软硬件的耦合或会影响控制的精度,并最终影响到实际的驾驶效果。
面对上述技术栈难题,中金研究认为大模型等人工智能前沿进展在未来或有用武之地,有望助力智能驾驶能力的升阶。具体而言,Transformer、端到端、多模态和世界模型是几类值得关注的前沿进展。
Transformer架构是大模型的基石,擅长建模远距离关系,可以接受Prompt形式的学习方法,能够有效关联多种模态的信息并合成为统一形式的信号,性能通常随参数量的扩大而大幅提升,除了感知领域外,也正逐渐被应用于预测和决策领域。端到端将独立的算法模块纳入完全可微的统一模型框架,特征空间可在模型的各个部分完整传播,更彻底的数据驱动成为可能。多模态嫁接大语言模型已涌现的上下文学习、零样本学习、逻辑推理、常识判断等能力,是提升智能驾驶技术栈泛化能力的潜在路径(此前的方法通常是实车采集/仿真构建Corner case,然后将数据用于AI模型的进一步训练)。世界模型通过让模型基于历史信息预测未来驾驶环境的演变,构建了一种更高效的学习海量智能驾驶数据的先验分布的训练方式,有潜力成为智能驾驶领域的Foundation model。[2]
事实上,中金研究看到不少Robotaxi企业已经开始应用大模型的思想,来强化自身技术栈的能力。在2024年Apollo Day上,百度发布了支持L4级自动驾驶的大模型Apollo ADFM,基于大模型技术重构自动驾驶,采用隐式传递、联合训练的端到端思想,感知和决策的模型属性和数据驱动显著增强,公司公开表示该技术可以兼顾安全性和泛化性,安全性有望高于人类驾驶员10倍以上[3]。
当前,不少L4 Robotaxi企业都开始在技术栈中应用transformer、端到端乃至语言模块Prompt的思想,技术栈能力获得大模型的赋能,中金研究认为这或许有望加速L4 Robotaxi技术水平的成熟。
2024年2月,OpenAI发布视频生成模型Sora,展现出世界模型的诸多特点,市场较为关注Sora在自动驾驶领域的应用前景。考虑到自动驾驶对于安全性具有严格的要求,而Sora在部分案例中对基本物理交互的把握仍有不准确之处,中金研究认为当前Sora还较难直接用于车端的自动驾驶。
短期来看,Sora有望应用于自动驾驶仿真,基于实车采集的视频微调生成新的验证场景,或生成新的合成数据用于自动驾驶模型的训练。
中长期来看,中金研究看好以Sora为代表的世界模型的潜力,构建了一种更高效的学习海量智能驾驶数据的先验分布的训练方式,有潜力成为智能驾驶领域的Foundation model,海外智能驾驶龙头特斯拉亦曾在CVPR 2023公开分享在相关路线上的探索和长远愿景。
图表3:经典的智能驾驶软件技术栈

注:本图仅为经典的智能驾驶软件技术栈,为中金公司研究部根据文献和其他公开资料整理,业界当前实际使用的技术栈可能会有所差别 资料来源:《无人驾驶原理与实践》(机械工业出版社,2018年),《自动驾驶技术概论》(清华大学出版社,2019年),《自动驾驶汽车环境感知》(清华大学出版社,2020年),《自动驾驶汽车定位技术》(清华大学出版社,2019年),《自动驾驶决策与控制》(清华大学出版社,2019年),《自动驾驶汽车平台技术基础》(清华大学出版社,2019年),《Self-driving cars: a survey》by Claudine Badue, Ranik Guidolini, etc., Waymo,特斯拉AI Day,小鹏官网,轻舟智航官网,CSDN,焉知汽车,九章智驾,智车Robot,中金公司研究部
图表4:智能驾驶大模型概览
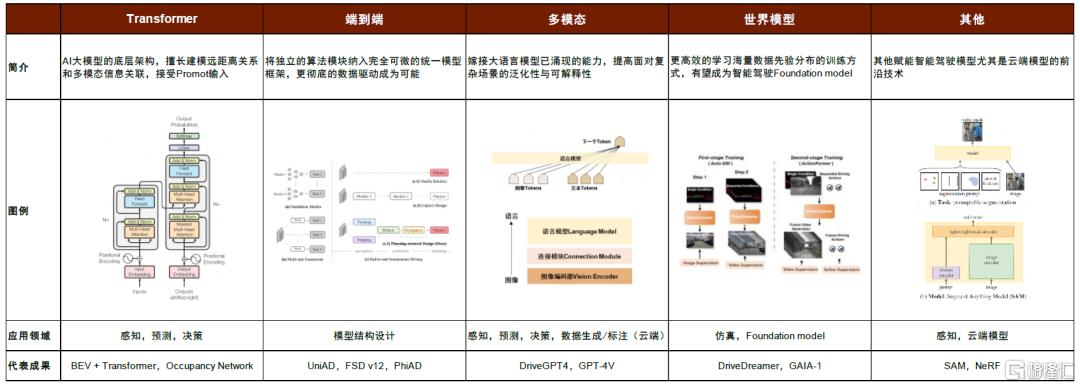
资料来源:A. Vaswani, N. Shazeer, et al., "Attention is All You Need", 2017,Y. Hu, J. Yang, et al., “Planning-oriented Autonomous Driving”, 2023,C. Li, Z. Gan, et al., “Multimodal Foundation Models: From Specialists to General-Purpose Assistants”, 2023,X. Wang, Z. Zhu, et al., “DriveDreamer: Towards Real-world-driven World Models for Autonomous Driving”, 2023,A. Kirillov, E. Mintun, et al., “Segment Anything”, 2023,中金公司研究部
图表5:Sora等世界模型在自动驾驶领域的应用前景
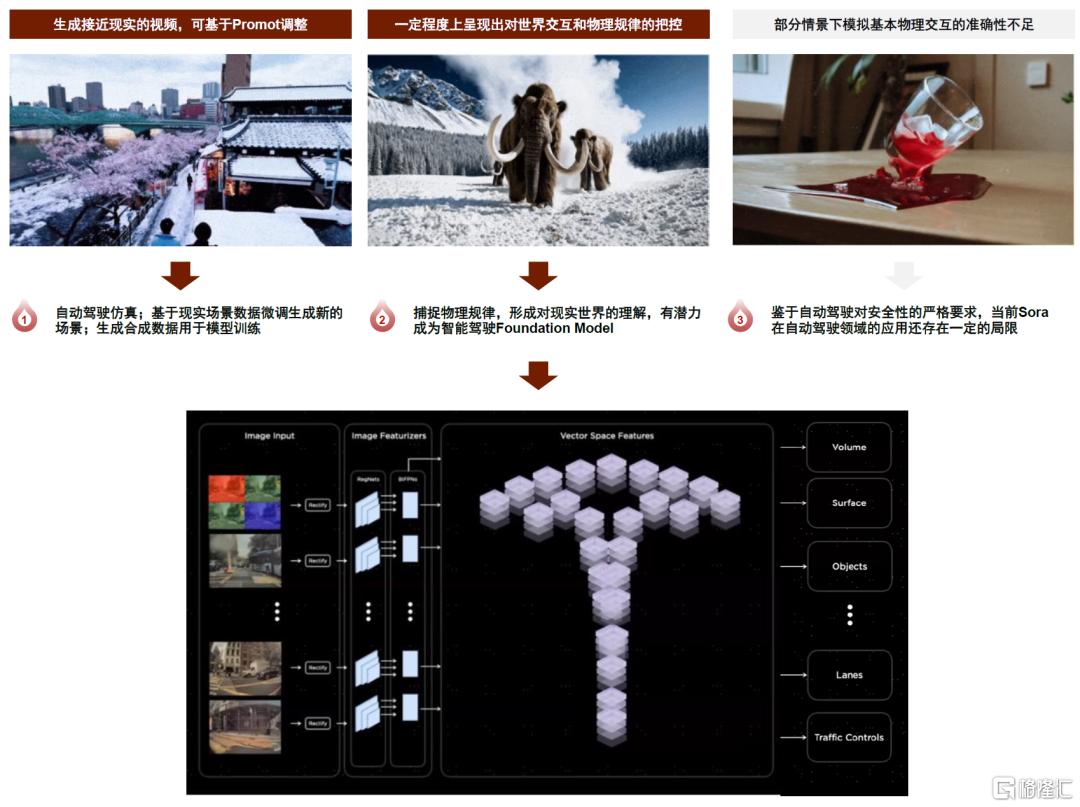
资料来源:OpenAI官网,特斯拉AI Day,中金公司研究部
问题2:Robotaxi的单位经济(UE)模型怎样计算,未来提升空间如何?
在本章,中金研究将尝试梳理Robotaxi单位经济(UE)模型的计算框架,分析影响其UE模型的主要因素,梳理未来UE模型的提升空间,从而从商业的视角探讨,为了用有性价比的方式实现自动驾驶,还需要从哪些方面来努力。(详细UE模型测算请详见报告)
在收入端,作为一种客运服务,Robotaxi主要按照行驶的公里数收取打车费;在成本端,Robotaxi企业需要承担车辆的折旧、电费、停车费和保险费等,同时为了帮助Robotaxi在困难场景脱困,通常还需要在车上或者远程部署一定数量的安全员进行监督,因此Robotaxi企业还会付出安全员成本。
收入、折旧、安全员成本是影响Robotaxi UE模型的三个重要因素,中金研究具体分析如下:
► 收入:影响因子包括每日接单量、每单平均里程、每公里单价等,这些因素和Robotaxi本身的技术水平和乘坐体验、消费者的接受程度、政策允许运营的范围以及Robotaxi车队数量等密切相关。中金研究认为未来的提升路径包括:1)打磨和完善Robotaxi的技术栈能力,提升安全、舒适、高效等属性,提高消费者的接受程度;2)政策允许Robotaxi运营的区域逐渐拓展;3)Robotaxi企业提高在区域内的车辆铺设数量,使车队达到一定的密度,缩短乘客所需等待的时间,形成规模优势和网络效应。
► 折旧:与普通的车辆不同,Robotaxi增加了激光雷达、摄像头、车端推理芯片等自动驾驶套件,此外出于安全性和冗余性的考虑,Robotaxi通常使用高精度地图,且会在线控、传感器和域控等层面设置冗余,以上均会使得Robotaxi的车辆成本比普通车辆更高,从而带来更高的折旧成本。在未来,中金研究认为改善的路径包括:1)由后装车变为前装车,这既关乎车辆运行的稳定性,也关系到成本。
2)增强车队数量,形成规模效应,从而在向主机厂购买裸车时有更大的议价空间;3)软件能力提升,降低硬件配置要求,例如激光雷达数量从6个降为3个、从必须使用机械式雷达到半固态雷达也能适配等;4)激光雷达等零部件本身的降本,NOA智能驾驶的普及带动各类零部件使用量的提升、推动价格下降,中金研究认为L4 Robotaxi也将受益于这一降本趋势。
► 安全员成本:根据交通运输部于2023年12月发布的《自动驾驶汽车运输安全服务指南(试行)》,从事出租车客运的完全自动驾驶汽车,远程安全员人车比不得低于1:3[4]。在未来,随着算法能力的进步、泛化性提升,Robotaxi所需安全员帮助的场景或逐渐减少;而技术的持续进步,也有望为政策放宽人车比要求提供更多的信心。
综上可以看出,Robotaxi UE模型在早期通常为亏损状态,而未来的改善需要持续关注技术、政策和车队数量等层面的变化。同时,以上因素之间也会发生相互影响,如单车UE的改善会提高Robotaxi企业增加车队数量的意愿,而增加车队数量本身将改善单车UE。根据ARK Invest的研究,随着自动驾驶的规模化落地,乘用车的单英里成本有望下降至0.25美元。
值得注意的是,上面中金研究讨论的仅为Robotaxi企业自持车队这一种商业模式,属于重资产模式。事实上,智能驾驶企业也在尝试更多元的商业模式,如第三方持有资产模式(轻资产)、C端消费者持有资产模式(轻资产)和合资公司模式等,在这些模式下,Robotaxi的UE模型或将有所改变。
但是,不论采用何种商业模式,中金研究认为Robotaxi UE的核心仍然将是围绕技术、政策和车队数量等方面,提升收入水平、降低现有成本。
图表6:Robotaxi典型商业模式示意
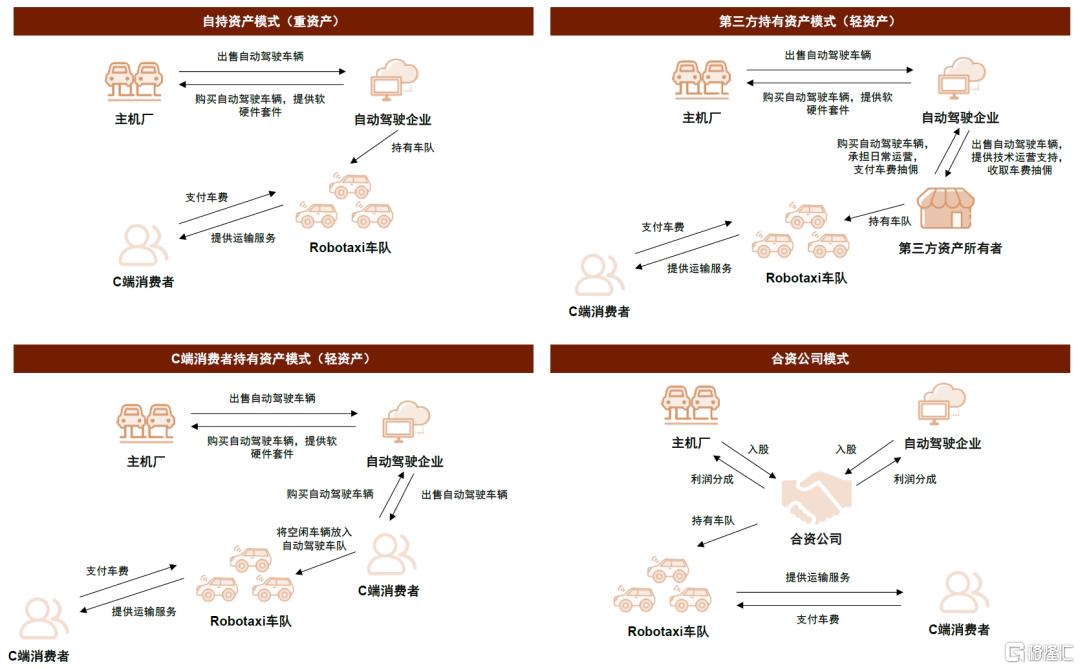
注:主机厂和自动驾驶企业可能为同一家企业,如特斯拉 资料来源:特斯拉公告/AI Day,百度Apollo公众号,小马智行公众号,中金公司研究部
问题3:从政策和企业的视角,Robotaxi的落地进行到哪一步了?
政策视角:国家和地方多项政策助力Robotaxi行业健康发展
国内情况
整体来看,我国Robotaxi已从研发测试逐渐进入商用部署的过渡期,围绕智能网联车、自动驾驶功能实现等方面,政府先后出台一系列支持与规范性质的政策和法规。支持层面,鼓励特定场景示范应用、允许开放试点、积极完善软硬件配套;规范层面,约束智能网联车的事前准入、事中管理与事后权责划分。此外,现阶段政策也在探讨自动驾驶交通事故的权责划分,部分城市进入试点探索阶段。
2024年6月,我国首批确定由9个汽车生产企业和9个使用主体组成的联合体,将在北京等7个城市展开智能网联汽车准入和上路通行试点。中金研究认为,试点将支撑相关法律法规与技术标准的修订,完善智能网联汽车生产准入与道路交通安全体系,推动自动驾驶的落地。
在各个城市,相关政策亦陆续出台,逐渐扩大试点范围,助力智能网联体系发展。根据工信部数据,截至2023年年底,全国共建设17个国家级测试示范区、7个车联网先导区、16个智慧城市与智能网联汽车协同发展试点城市。根据央视网[5],截至2024年4月底,我国共开放智能网联汽车测试道路29,000多公里,发放测试示范牌照6,800多张,道路测试总里程超过8,800万公里。下面,中金研究按照城市维度对自动驾驶相关政策进行梳理:
► 北京:2022年4月底,北京市智能网联汽车政策先行区率先发布首批“无人化示范应用道路测试”通知书,来自百度和小马智行的14辆无人化乘用车获准上路测试[6]。截至2024年3月,北京高级别自动驾驶示范区累计为29家测试车企发放了道路测试的牌照,自动驾驶测试的里程超过2,500万公里[7],覆盖通州、顺义、亦庄、大兴等多个地区。2024年7月,北京发布《北京市自动驾驶汽车条例(征求意见稿)》,强调安全员需按国家有关规定配备,明确了交通事故的责任认定(车辆在自动驾驶系统功能激活状态下发生道路交通事故造成人身伤亡、财产损失的,属于自动驾驶汽车一方责任的,由车辆所有人、管理人承担赔偿责任)。
► 上海:2018年以来,上海分阶段、分批次开放自动驾驶测试道路,打造了嘉定、临港、奉贤、金桥等四个示范区。截至2024年3月,上海已有32家企业、794辆车获得自动驾驶道路测试、示范应用、示范运营牌照,累计测试里程约2,290万公里,覆盖浦东新区、嘉定等行政区,测试总时长约122万小时[8]。2024年3月,上海将金桥经济技术开发区全域及浦东申江路、沪南公路、两港公路等道路开放为自动驾驶测试道路[9]。
► 广州:2018年,广州允许部分自动驾驶企业“先行先试”,Robotaxi上路广州。2024年2月,广州推出《广州市智能网联汽车创新发展条例(征求意见稿)》。至2024年7月, 广州已累计开放827条自动驾驶测试道路,单向里程约1,666公里,涉及南沙区、黄埔区等6个行政区,已有15家企业在广州开展不同级别的道路测试和L3/L4高级别测试活动,文远知行、小马智行、百度阿波罗、滴滴等自动驾驶企业或自营或与广州公交集团、祺宸科技等运营商合作,投入超180台自动驾驶车辆开展示范运营和商业化示范应用[10]。
► 深圳:2022年,深圳率先为智能网联汽车立法,出台《深圳经济特区智能网联汽车管理条例》。2023年7月,深圳发放了全国首张L3高快速路测试号牌(比亚迪);同年8月,深圳发布智能网联汽车10项地方标准。截至2024年5月,深圳全市累计开放测试示范道路944公里,覆盖南山区、宝安区等多个行政区,累计向19家企业349辆智能网联汽车发放道路测试及示范应用通知书1,037张[11]。
► 武汉:截至2023年底,武汉全市累计开放测试道路里程已突破3,378.73公里(单向里程),覆盖12个行政区,辐射面积约3,000平方公里,触达人口超770万,开放里程和开放区域数量全国领先[12]。
► 其他城市:此外,长沙、杭州、南京等地亦在积极推进Robotaxi落地:2020年4月,长沙Robotaxi服务向民众全面开放,运营范围约130平方公里[13];2024年5月,《杭州市智能网联车辆测试与应用促进条例》正式施行[14];南京在江宁开发区、秦淮白下高新区、建邺区科技生态岛、溧水开发区等多地打造智能网联汽车应用场景[15]。
图表7:各个城市的自动驾驶测试与运营区域展示(部分)
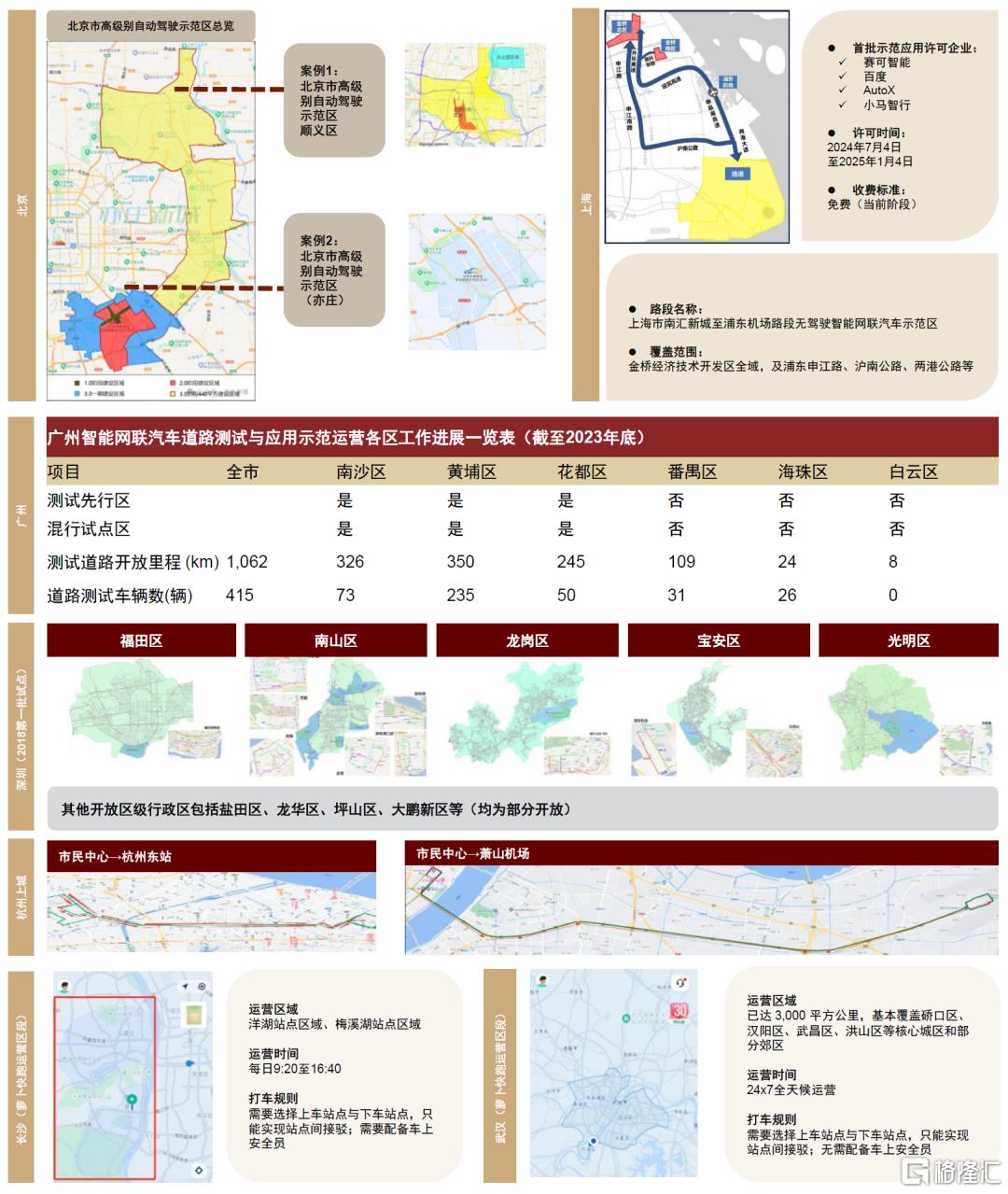
注:1)本图仅为对智能驾驶运营区域的示意;2)上海市智能驾驶运营范围图只选取上海市南汇新城至浦东机场路段无驾驶智能网联汽车示范路段情况,不代表全市智能驾驶运营范围;3)深圳市智能驾驶运营范围图为2018年第一批试点情况,不代表当前情况;4)杭州市智能驾驶运营范围图仅列举上城区情况,不代表全市智能驾驶运营范围;5)长沙市与武汉市智能驾驶运营范围图只列举萝卜快跑7月份运营范围地图,不代表全市所有品牌智能驾驶运营范围。 资料来源:亦庄新城公众号,北京顺义公众号,上海交通公众号,上城发布公众号,深圳梦公众号,广州市智能网联汽车示范区运营中心,广东省智能网联汽车创新中心,萝卜快跑APP,中金公司研究部
海外情况
海外市场围绕自动驾驶的政策制定亦在稳步前进。2012年,美国内华达州为谷歌自动驾驶汽车发放了全球第一张测试牌照[16]。2017年,德国通过《道路交通法(第八修正案)》,成为为自动驾驶立法的国家[17]。同年,德国还发布了全球首份针对自动驾驶的伦理指南,确立了自动驾驶的20条伦理准则[18]。2021年,德国通过《自动驾驶法》,首次对L3以上级别的自动驾驶汽车进行规制[19]。2023年,日本《道路运输车辆法》修正案正式生效,允许L4级自动驾驶车辆在日本公路上行驶[20]。
整体来看,美国推进自动驾驶的布局时间线相对更长,经历了多轮迭代。2016年起,美国交通部就连续发布Automated Vehicles(AV)1.0~4.0及自动驾驶综合计划(AVCP),对自动驾驶产业进行顶层指引,并以五年规划为蓝图制定智能交通发展战略,探索自动驾驶商业化落地的政策配套。
美国各个地区的具体落地进程有所差异,但Robotaxi运营版图总体保持扩张趋势。目前,亚特兰大、达拉斯、休斯敦、迈阿密、西雅图、波士顿、匹兹堡等多个城市已经开始无人驾驶汽车载客试点运营。凤凰城、旧金山、洛杉矶等城市已准许Robotaxi收费运营。将视角转向加州这一特定案例,美国加州车辆管理局(DMV)及公共事务委员会(CPUC)逐年推进对加州自动驾驶道路测试和商业化应用政策的探索,目前已有多家企业获得自动驾驶测试和部署许可。自2022年起,加州以旧金山为试点尝试Robotaxi落地的可能,并于2023年8月首次放开全时段、全区域、主驾无人的Robotaxi商业化运营。
企业视角:头部Robotaxi企业落地情况梳理
近年,Robotaxi车队规模不断扩容,里程与出行订单量增长,但和传统出行行业相比,整体体量仍相对有限。当前,一线城市仍是国内头部Robotaxi企业布局的重点,而考虑到武汉、长沙等城市对自动驾驶的支持力度,中金研究认为未来其他城市也有望成为Robotaxi落地的重要区域。硬件设施层面,实现前装量产的企业仍为少数,更多前装量产的车型正在研发过程中。商业模式上,多数Robotaxi企业选择按照出行服务的方式定价;运营时段上,萝卜快跑是为数不多尝试实践24x7运营的企业(在武汉)[21]。
下面,中金研究对部分头部Robotaxi企业的经营情况和最新进展做简单梳理:
文远知行
文远知行成立于2017年,为L4级自动驾驶公司。当前,文远知行产品矩阵分为L4和L2+/L3两部分,L4级产品覆盖网约车、公交车、货运、环卫等多种场景,包括自动驾驶出租车、自动驾驶小巴、自动驾驶货运车和自动驾驶环卫车;L2+/L3级主要为高阶智能驾驶产品。文远知行是同时拥有中国、美国、阿联酋、新加坡四地自动驾驶牌照的自动驾驶公司。[22]
文远在Robotaxi上与广汽、日产等OEM合作,搭载全栈式软硬件解决方案。2019年,公司于广州开放自动驾驶出租车服务,打造了全国首支落地一线城市的Robotaxi车队。2022年,文远知行突破公开道路上自动驾驶里程数1,000万公里。2023年6月,公司获批在北京开展Robotaxi纯无人示范应用,2023年11月获批在北京开展纯无人商业化收费运营。[23]
小马智行
小马智行成立于2016年末,拥有Robotaxi、Robotruck和POV三大业务板块,产品覆盖L2+至L4级智能驾驶。2018年12月,公司推出国内首个自动驾驶出行服务PonyPilot,旨在通过自营或合作运营L4级车队为公众提供出行服务。[24]
当前,小马智行自动驾驶出行服务覆盖北京(亦庄、大兴机场)、上海(嘉定)、广州(南沙)、深圳(前海、宝安、南山),目前公司在北京、广州为乘客提供全无人驾驶车辆服务,在上海和深圳提供“主驾位无人”的无人驾驶车辆服务。截至2024年5月,小马智行已累积超过3300万公里自动驾驶路测里程,其中无人化自动驾驶测试里程超300万公里。[25]
与丰田紧密合作,布局Robotaxi前装量产。2024年4月25日,小马智行、丰田中国、广汽丰田于北京车展宣布三方合资公司将完成注册,公司规划第一期将向中国市场投放千台规模的铂智4X自动驾驶车辆,产线下线后无缝接入小马智行Robotaxi运营平台,在国内一线城市开展规模化的全无人驾驶出行服务。[26]
百度
百度对自动驾驶的布局可以追溯到2017年发布的Apollo计划,其自动驾驶产品萝卜快跑首发于2021年[27]。发展至今,萝卜快跑实现了较广的落地规模和商业化运营,已获武汉、北京等11座城市无人驾驶测试牌照,其中武汉、北京等地可以公开收费运营。根据Create 2024,萝卜快跑在武汉的车队规模预计在2024年突破1,000台[28]。
据雷峰网[29],以萝卜快跑第五代无人车为例,该款车型成本为48万元,基于北汽极狐阿尔法T纯电车型定制而成。同时,百度也在与江铃集打造下一代成本更低的前装量产车型颐驰06[30],搭载40余个不同类型的传感器(根据禾赛科技公告[31],其主激光雷达为禾赛独家供应,单车搭载4颗超高清远距激光雷达 AT128),双芯片配置,整车价格约为20万元。
AutoX
AutoX成立于2016年,公司的Robotaxi产品现已获北京、上海、广州、深圳等地无人驾驶测试牌照,并在上海、深圳等城市公开收费运营。公司第五代Robotaxi车型与克莱斯勒合作,原厂支持车规级冗余线控,搭载50枚传感器,车辆控制单元算力达2,200TOPS。[32]
Waymo
Waymo成立于2016年,其前身是Google于2009年开始的自动驾驶项目,目前主要提供L4级别的自动驾驶平台(Waymo Driver),商业模式包含提供Robotaxi服务(Waymo One)和无人驾驶货物运输服务(Waymo Via)。当前,Waymo One已获批在凤凰城、旧金山等地收费运营,行驶速度最高可达65英里/小时,加州交通管理局不对车队规模不设上限[33],且公司在旧金山等地为24x7运营。Waymo One包含捷豹I-PACE等车型[34],同时正与极氪合作前装量产的Robotaxi车型。截至2023年12月,Waymo在现实和模拟环境中行驶的里程总计约200亿英里(其中公共道路上行驶了约2,000万公里)[35]。
图表8:自动驾驶公司的配套硬件及供应商总结

资料来源:小马智行官网/公众号,文远知行官网/公众号,百度Apollo官网/公众号,AutoX官网/公众号,Waymo官网,江铃集团,禾赛科技公众号,NVIDIA英伟达企业解决方案,基石资本,汽车之心,广州南沙发布,汽车之家,车东西,量子位,智能车参考,雷锋网,中金公司研究部
图表9:自动驾驶公司2024年商业化落地亮点事件汇总

资料来源:文远知行公众号,小马智行公众号,商务部国际商报,浦东发布公众号,Waymo官网,中金公司研究部
问题4:如何看待Robotaxi的投资逻辑?
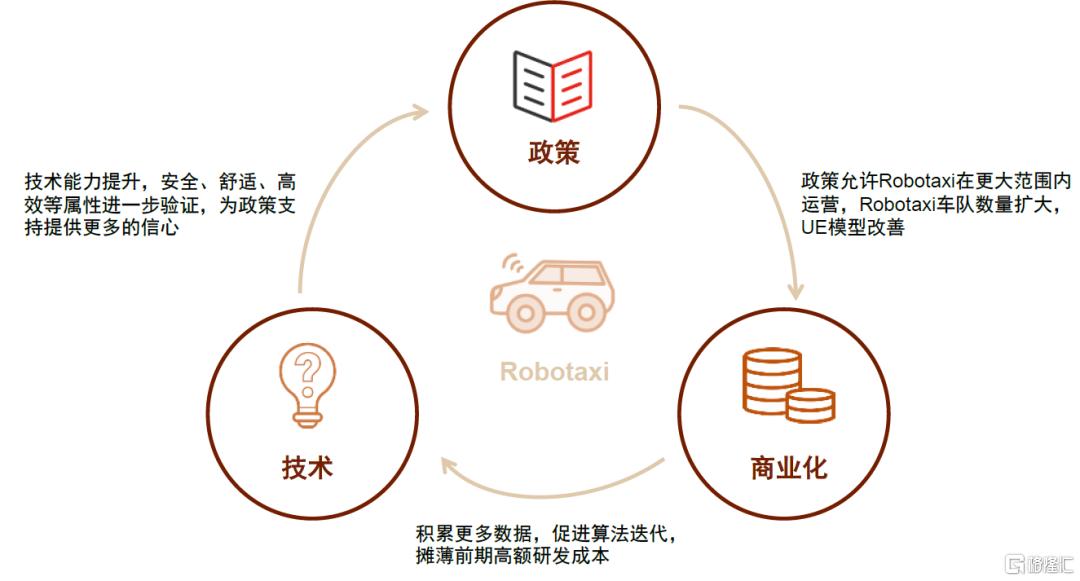
在本文前三章,中金研究围绕技术、商业化(UE)和政策这三个影响Robotaxi行业的重点因素进行了详细分析。事实上,中金研究认为Robotaxi行业的长远发展正依赖于这三个要素形成的正循环:
1)Robotaxi企业的技术达到一定水平后,政策开放部分区域进行测试和示范应用;2)在实地测试和应用的过程中,Robotaxi企业积累更多数据,用于训练和完善算法;3)随着技术能力提升,安全、舒适、高效属性得到验证,为进一步的政策支持提供更多的信心。
4)政策允许Robotaxi在更大范围内运营,Robotaxi企业的车队规模进一步扩大。在这个正向循环中,Robotaxi的UE水平逐渐改善,企业有意愿投放更多车辆,而车队规模的扩大可以持续摊薄前期高额的研发成本,企业盈利改善,最终推动整个行业实现健康、可持续的发展。
图表10:政策、商业化和技术三要素构成正循环,共同影响Robotaxi行业的长远发展
资料来源:中金公司研究部
当前,中金研究看到Robotaxi企业在技术和商业化层面取得了一定进步,政策也支持行业健康发展;但是,三大因素本身是一个循环往复、渐进向前的过程,行业发展需要更多的时间、需要长期主义。
而如果要加速正循环的运转,通常是其中有一个因素首先获得突破进展(中金研究认为这个因素更有可能是技术),然后推动其他两个因素的前进,从而形成正向飞轮。
中金研究认为,要实现这个目标,当前行业仍有一定的进步空间;而在飞轮完全运转之前,Robotaxi企业或会承担一段时间的亏损。
基于上述判断,中金研究尝试总结现阶段Robotaxi企业的关键竞争要素[36]:
► 资金实力:Robotaxi技术的进步离不开人才和算力,背后的支撑是资金;车队数量达到一定规模前,Robotaxi通常由企业自持,形成资金占用;行业飞轮形成前,Robotaxi企业或承担一段时间的亏损;交通事故的责任由Robotaxi企业承担。以上因素均使得,Robotaxi企业需要较强资金实力的支撑,而这背后就看企业是否有其他盈利业务造血,是否有较强的融资能力,或是否有较多的现金储备。同时,中金研究认为自动驾驶企业在封闭、低速等场景率先实现商业化落地,获得一定的利润支撑,也是可行的路径。例如,在近年广州路测中,中金研究就可以看到微循环交通等低速场景的自动驾驶应用占比提升;而在港口、矿山等场景,自动驾驶亦在持续落地当中。
► 数据闭环:神经网络在自动驾驶技术栈中的渗透率提升,需喂入大量训练数据;随着AI大模型探索的深入,模型参数量或进一步提升,要求Robotaxi企业搭建成熟的数据引擎和工具链。中金研究认为,自动驾驶企业数据闭环能力的强弱,将与其车队数量、产品丰富度、模型架构和工程能力等直接挂钩。
► 软硬一体:车型的调校和适配、车辆硬件的稳定性以及电子电气架构均与自动驾驶的能力紧密相关。对于聚焦算法的智能驾驶企业,与车企的深度合作甚至是绑定较为关键,因为前装车涉及车企的合作意愿,包括车企是否愿意重新设计整个底层架构、是否愿意深度开放各个接口等等。此外,中金研究也建议关注芯片和软件深度耦合的趋势。
► 技术创新能力:Robotaxi技术仍有进步空间,当前技术栈尚未实现收敛,秉持长期主义并能够快速革新是重要的软实力。中金研究认为,技术创新能力一方面需要高素质的软硬件工程师,另一方面也与研发团队灵魂人物以及整个公司文化和管理激励机制密不可分。
图表11:广州路测中,自动驾驶小巴等占比提升
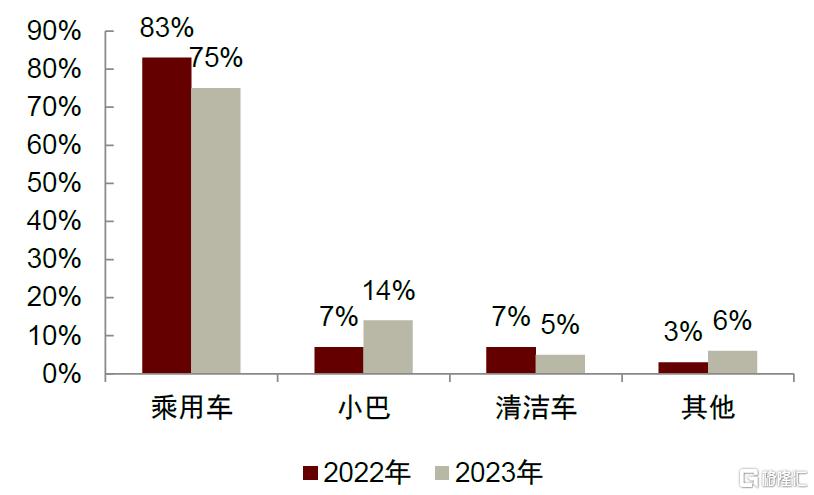
资料来源:广州市智能网联汽车示范区运营中心,广东省智能网联汽车创新中心,中金公司研究部
图表12:自动驾驶方案提供商有望获得更高的产业价值
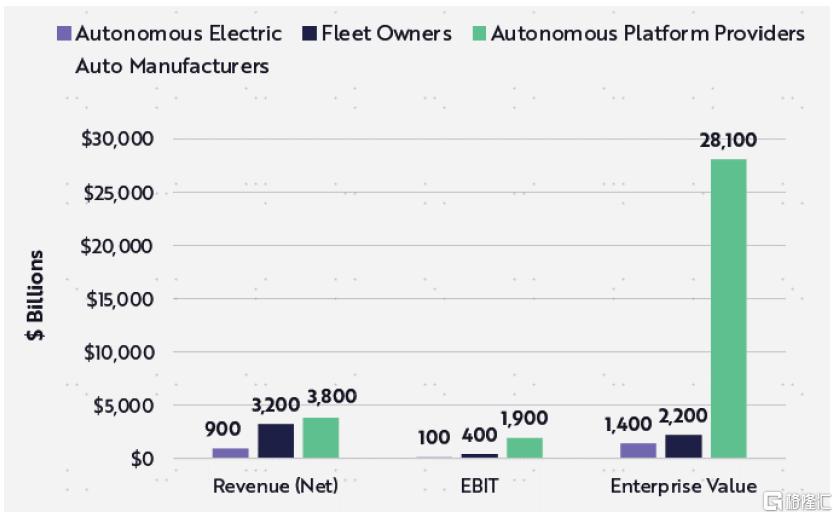
注:参考ARK Invest对于2030年的预测资料来源:ARK Invest,中金公司研究部
最后,给定行业正循环形成,中金研究建议关注以下细分赛道的投资机会:
► 自动驾驶解决方案提供商:根据ARK Invest的测算,到2030年,自动驾驶平台解决方案提供商有望获得更高的产业价值。中金研究建议从资金实力、数据闭环、软硬一体和技术创新等维度评估各个自动驾驶解决方案提供商,并关注其中头部企业的投资机会。
► 主机厂:建议关注在自动驾驶领域布局较为领先的头部主机厂。基于全栈自研和车队规模,头部主机厂往往能通过庞大的真实世界数据构筑真实世界AI,向软件驱动的AI科技公司演进,中金研究建议关注这些主机厂在Robotaxi领域的布局和进展。
► 硬件产业链:自动驾驶在硬件层面需要域控制器、冗余线控、激光雷达、推理芯片等硬件的支持,建议关注Robotaxi行业起量后对相关赛道硬件厂商业绩的带动。
注:本文摘自中金研究2024年7月20日已经发布的《探微智驾(三):Robotaxi四问四答》,分析师:肖楷 S0080523060007;魏鹳霏 S0080523060019;赵丽萍S0080516060004; 于钟海S0080518070011



